
Biologically Inspired Dynamic Thresholds for Spiking Neural Networks
-
Jianchuan Ding
- Bo Dong
- Felix Heide
- Yufei Ding
-
Yunduo Zhou
-
Baocai Yin
- Xin Yang
NeurIPS 2022
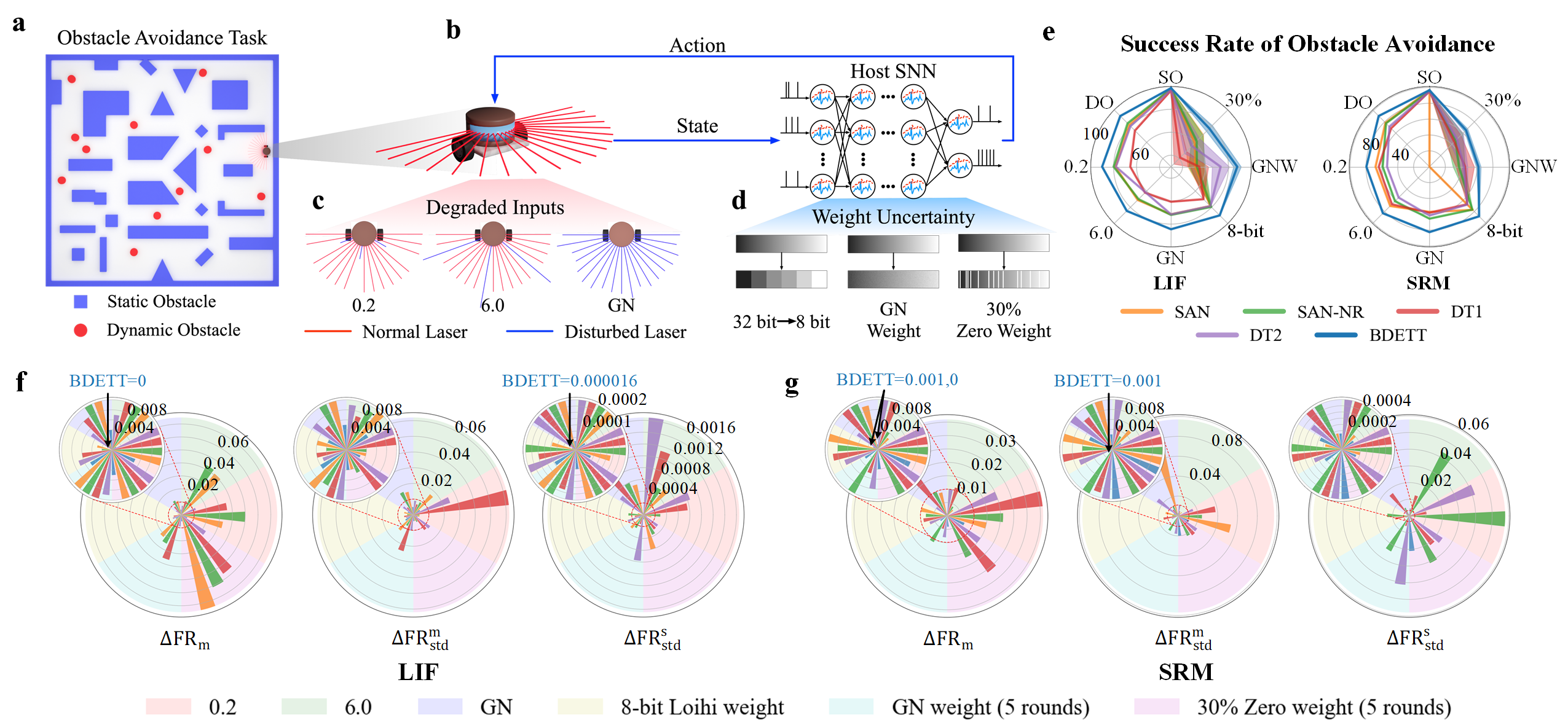
We introduced a novel bioinspired dynamic energy-temporal threshold (BDETT) scheme for Spiking Neural Networks (SNNs). The proposed BDETT is integrated into two widely used SNN models: a leaky integrate-and-fire (LIF) and a spike response model (SRM). We validate BDETT with these two SNN models for autonomous robotic obstacle avoidance tasks under normal and various degraded conditions, e.g., dynamic obstacles, degraded inputs, and weight uncertainty (a, c, and d). Extensive experimental results validate that the SNNs equipped with the proposed BDETT offer the strongest generalization across all tested scenarios (e). More importantly, we quantitatively validate that BDETT can significantly increase the homeostasis of the host SNN for robotic control tasks (f and g).
The dynamic membrane potential threshold, as one of the essential properties of a biological neuron, is a spontaneous regulation mechanism that maintains neuronal homeostasis, i.e., the constant overall spiking firing rate of a neuron. As such, the neuron firing rate is regulated by a dynamic spiking threshold, which has been extensively studied in biology. Existing work in the machine learning community does not employ bioinspired spiking threshold schemes. This work aims at bridging this gap by introducing a novel bioinspired dynamic energy-temporal threshold (BDETT) scheme for spiking neural networks (SNNs). The proposed BDETT scheme mirrors two bioplausible observations: a dynamic threshold has 1) a positive correlation with the average membrane potential and 2) a negative correlation with the preceding rate of depolarization. We validate the effectiveness of the proposed BDETT on robot obstacle avoidance and continuous control tasks under both normal conditions and various degraded conditions, including noisy observations, weights, and dynamic environments. We find that the BDETT outperforms existing static and heuristic threshold approaches by significant margins in all tested conditions, and we confirm that the proposed bioinspired dynamic threshold scheme offers homeostasis to SNNs in complex real-world tasks. This is the first work to demonstrate that dynamic threshold schemes can offer bioplausible homeostasis to SNNs in robotic real-world tasks under normal and degraded conditions, dramatically enhancing the generalizability and adaptability of the host SNNs.
Paper
Jianchuan Ding, Bo Dong, Felix Heide, Yufei Ding, Yunduo Zhou, Baocai Yin, Xin Yang
Biologically Inspired Dynamic Thresholds for Spiking Neural Networks
NeurIPS 2022
Robotic Control Experiments
In the video on the right, we show experimental results for robotic obstacle avoidance and conventional continues control tasks (HalfCheetah-v3 and Ant-v3 tasks). In the obstacle avoidance tasks, a robot is moving through a maze that contains various obstacles. The robot is equipped only with a 2D lidar scanner. We learn an SNN equipped with the proposed BDETT scheme that is capable of directly predicting control outputs to the robot in an end-to-end fashion, without separate modules for vision or control.
Bioinspired Dynamic Energy-Temporal Threshold (BDETT)
Motivated by the behavior of spiking threshold dynamics in biological nervous systems, we propose a model with dynamic thresholds that exhibit positive and negative correlations with the average membrane potential and the preceding rate of depolarization, respectively. The scheme comprises two components: a dynamic energy threshold (DET) and a dynamic temporal threshold (DTT) schema. The DET is inspired by a biological predictive model which can predict the occurrences of spikes based on the previous membrane potential in the inferior colliculus of a barn owl. The proposed DTT component is inspired by the fact that a monoexponential function can effectively present a negative correlation. Notably, we provide an analysis of the original biological models and propose layerwise statistical cues for SNNs to replace the constants in the two original biological models.

Continuous Robot Control with BDETT
For the HalfCheetah-v3 and Ant-v3 tasks, similar to the robot obstacle avoidance tasks, we evaluate on one standard and two specifically designed degraded inputs (see Figure b) and weight uncertainty (see Figure c) adverse conditions to demonstrate the strong generalization enabled by our BDETT. As shown in Figures d and e, under all experimental settings, the proposed BDETT offers the host SNNs the highest rewards, significantly improving upon the rewards of the baseline PopSAN model by at least 438 (i.e., the SRM-based PopSAN model under the “GN” setting) for the HalfCheetah-v3 tasks and 213 (i.e., the LIF-based PopSAN model under the “Random joint velocity” setting) for the Ant-v3 tasks. In Figures f-i, we show the changes induced in these three metrics when shifting from normal conditions (i.e., the base conditions) to all other experimental settings. The proposed BDETT offers the strongest homeostasis to the host SNNs among all competing approaches for both the HalfCheetah-v3 and Ant-v3 control tasks.
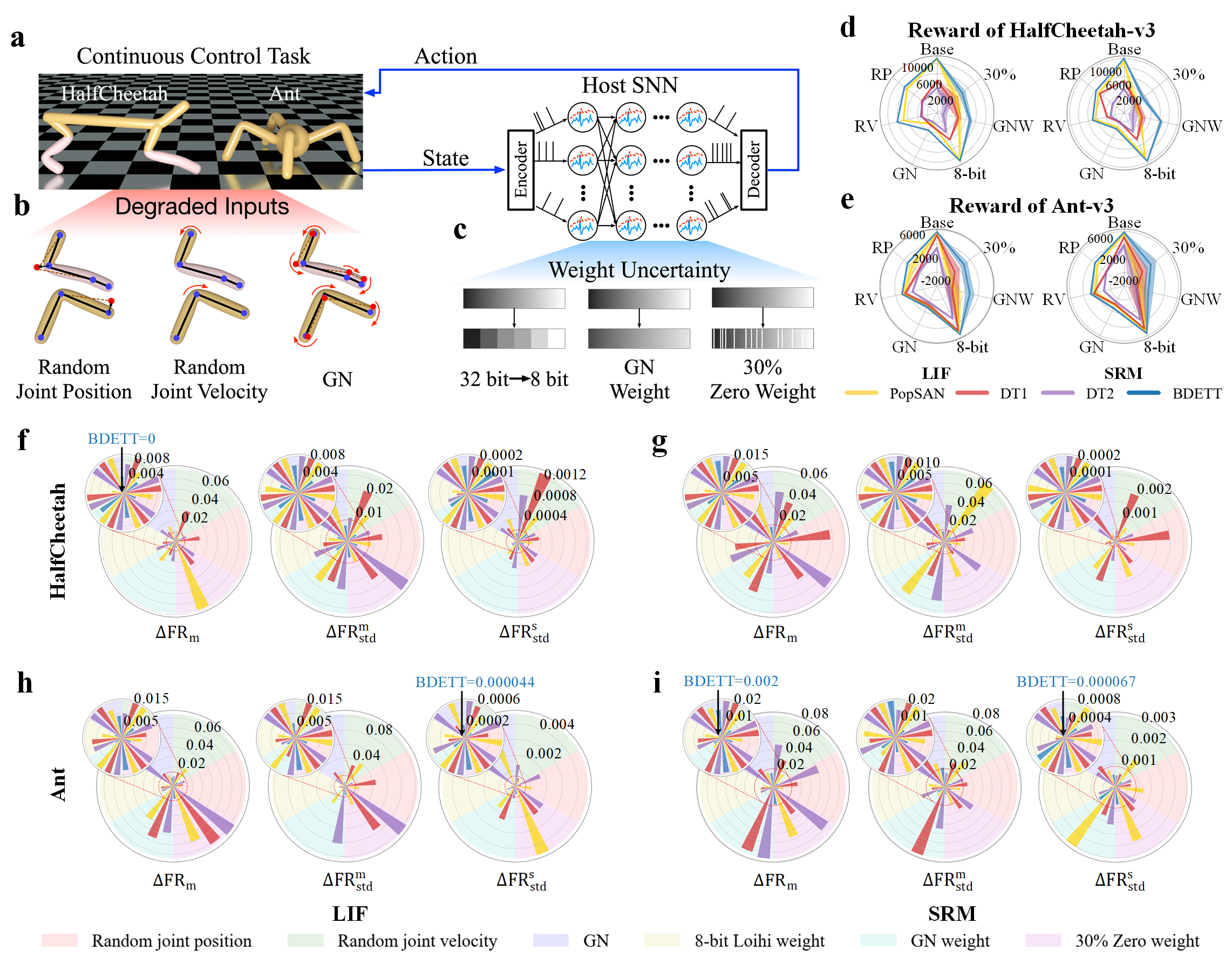
Image Classification with BDETT
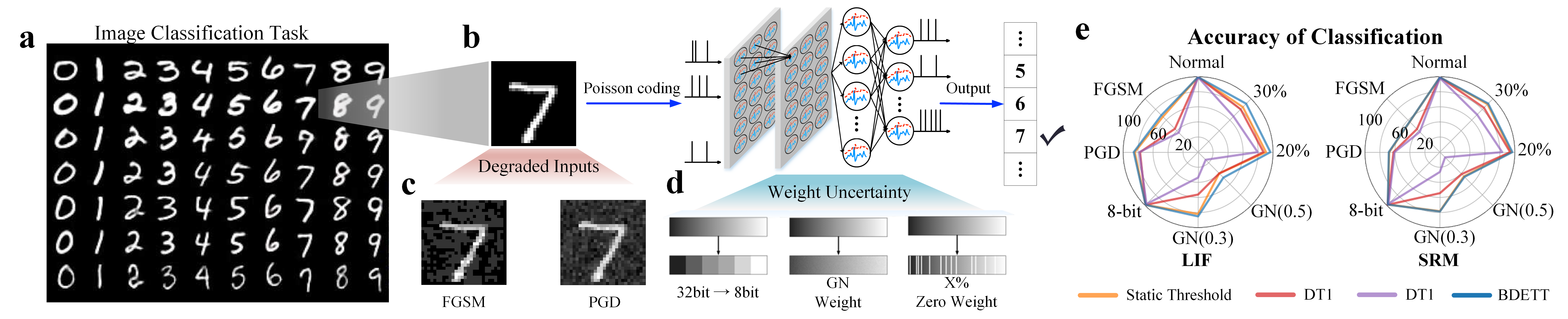
To measure the generalization of the proposed BDETT scheme, we conduct additional image classification experiments under normal and degraded conditions. To this end, we simulate degraded inputs similar to the robotic control tasks; see the weight uncertainty degraded settings illustrated in (d). In addition, we test on degradations that are tailored to classification from two adversarial attack methods; the fast gradient sign method (FGSM) and projected gradient descent (PGD) (c). As shown in (e), directly applying the proposed approach without any changes to image classification in degraded conditions compares favorably across all experimental settings and in terms of generalization. For stronger degradations, the Top-1 classification accuracy of both the baseline and our approach decreases, but the proposed method is less affected.
Related Publications
[1] Jiqing Zhang, Bo Dong, Haiwei Zhang, Jianchuan Ding, Felix Heide, Baocai Yin, and Xin Yang Spiking Transformers for Event-based Single Object Tracking. CVPR, 2022